El objetivo de esta página web es dar a conocer el proyecto, sus alcances, metas y avances en cada una de las áreas de investigación del mismo, así como también incentivar al apoyo de la comunidad académica y científica a este proyecto.
- Visión del proyecto a futuro (Descargar PDF)
Meta Inicial
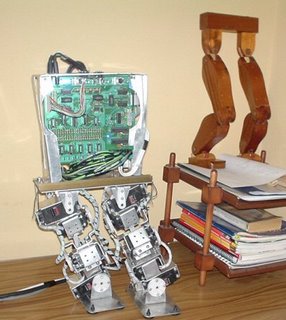
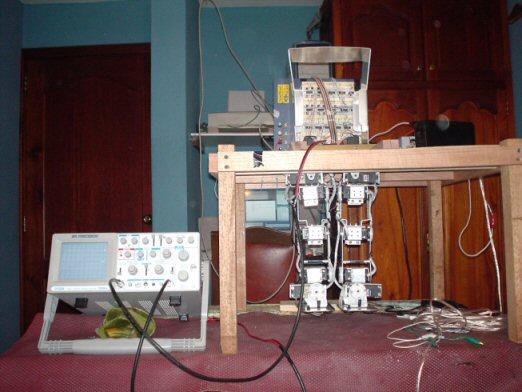
Diseñar y construir un robot bípedo en su primera fase, es decir, un robot que tenga la capacidad de caminar en línea recta sin perder su estabilidad dinámica.
- Resumen del proyecto realizado (Descargar PDF)
sábado, enero 06, 2007
sábado, septiembre 10, 2005

jueves, diciembre 23, 2004
Artículos y Publicaciones
Los siguientes archivos explican temas específicos sobre la ingeniería detras del robot bípedo:
- Fundamentos de la Caminata Bípeda. Descargar PDF
- Cinemática de un Robot Bípedo. Descargar PDF
- Cinemática inversa de un robot bípedo. Descargar PDF
- Planificación de caminata. Descargar PDF
Simulaciones del Robot en Matlab

- Simulación de un Robot Humanoide. Parte I. Descargar PDF
- Simulación de un Robot Humanoide. Parte II. Descargar PDF
- Simulación de un péndulo. Descargar .ZIP
- Simulación de las piernas del robot. Descargar .ZIP
- Comprobación cinemática. Descargar .ZIP
- Simulación de un péndulo en Realidad Virtual. Descargar .ZIP
- Simulación completa del Robot Humanoide. Descargar .ZIP
- Simulación de la cinemática inversa. Descargar .ZIP

Suscribirse a:
Entradas (Atom)